Quizlet4all
because learning tools should always be free
URL:
www.quizlet4all.netlify.app
GitHub URL:
www.github.com/FernandoMeier
Quizlet4all is a completely paywall and advertisement free website designed to help people learn vocabulary
and simple sentences in new languages. By importing an excel file formatted like described in the import
section the words get automatically converted into a new word-set, alternatively the set can also be created
by hand in the "current set" section. The "current set" section also allows the user to edit the words.
Other current features include the "flashcards" mode where the user is shown the word on one side of the card
and its definition on the other side when the card is clicked. The user can then decide to repeat that card
or marking it as learned, where the card will not reappear unless the page is refreshed. There is also
"writing" mode where the user has to write the definition of a give word into the text box. If the word is
entered incorrectly the user has to repeat it later, otherwise the word is accepted and the progress bar
goes up. If the user were unable to answer the question there is a small box underneath the text box where
the user can get the solution by hovering over the box.
The "learning" mode that can be seen in the navigation bar from the main menu is still under construction
and should combine the functions of "flashcards" and "writing" but also add a new element called "multiple
choice" where the user is confronted with a word and 4 definitions from the same set and has to select the
correct definition.
Robot arm
Need a helping hand?
URL: None
GitHub URL: None
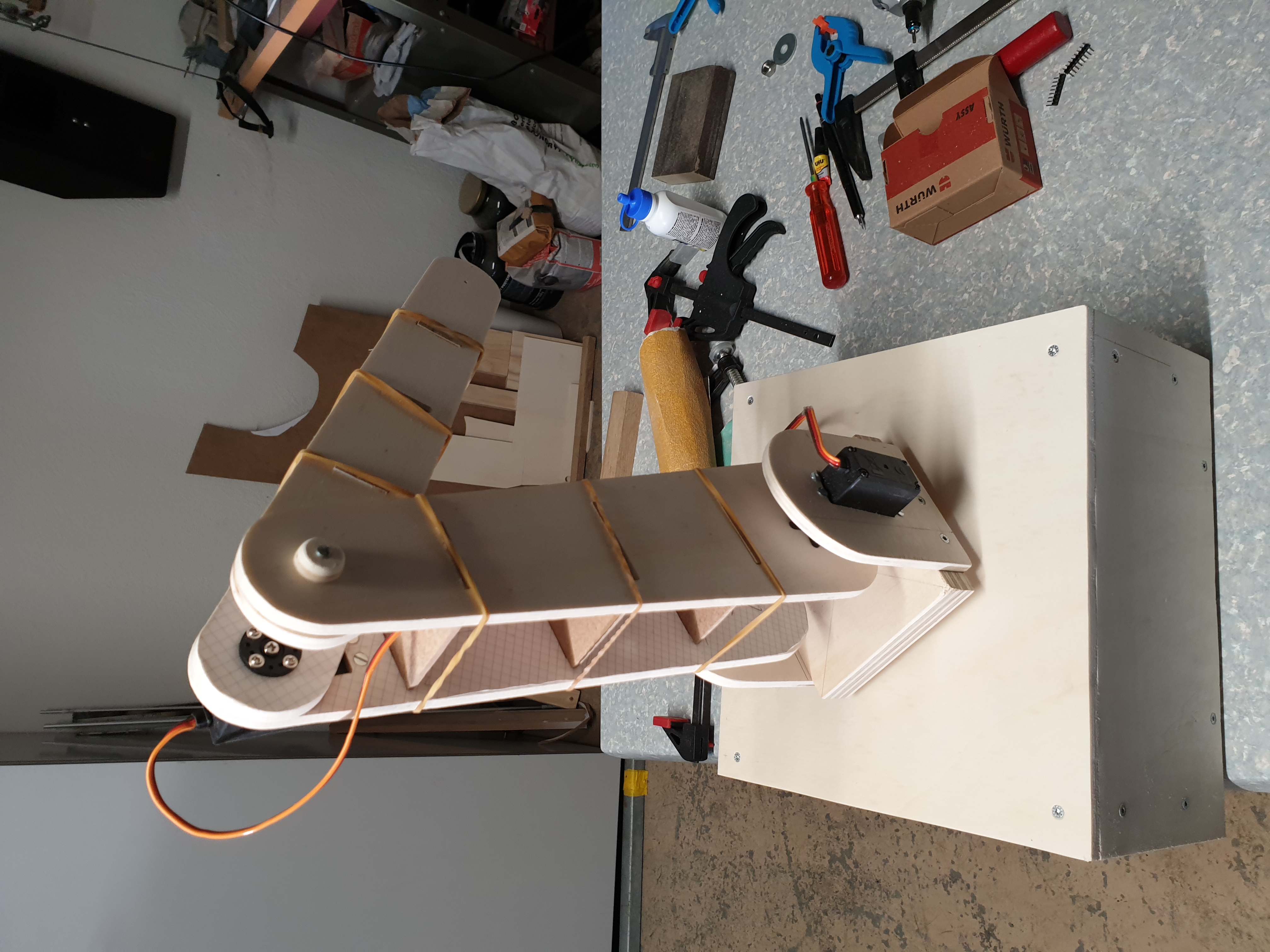
This project was my final project for the project-classes in secondary school that I decided to do. It is a
robotic arm steered by 6 servo motors, 2 Arduino UNO REV3 boards, an old TV remote and some infrared
sensors. everything is held together by a frame made completely out of wood except for the grabber which has
a few brass parts. The arm is able to grab objects of up to 2 kg of mass and move them around at a +/- 320°
angle. Due to the fact that the remote is the controller I had a lot of options on what functions I wanted
to integrate. I ended up with 3 different modes for the speed, movement of the base, first joint, second
joint and grabber. The three modes are slow, medium and fast. The slow mode is the most precise but also the
slowest, the medium mode is a good middle ground and the fast mode is the fastest but also the least precise
of the three. Every servo motor has its own power supply and the Arduino boards are powered each by their
own 9V battery. The remote is powered by 2 AA batteries.
Some images of the unfinished/finished arm: